5.1 Stress analysis of a plate with a hole
[prev]
Tutorial path:
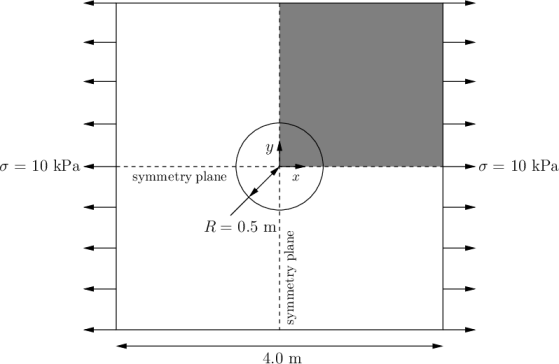
This tutorial describes how to pre-process, run and post-process a case involving linear-elastic, steady-state stress analysis on a square plate with a circular hole at its centre.
- thermal stress analysis using solidDisplacementFoam solver
- validation against the analytical solution
The plate dimensions are: side length 4  and radius
and radius  0.5
0.5  . It is loaded
with a uniform traction of
. It is loaded
with a uniform traction of  10
10 
 over its left and right faces as shown
in Figure 5.1. Two symmetry planes can be identified for this geometry and
therefore the solution domain need only cover a quarter of the geometry, shown by
the shaded area in Figure 5.1.
over its left and right faces as shown
in Figure 5.1. Two symmetry planes can be identified for this geometry and
therefore the solution domain need only cover a quarter of the geometry, shown by
the shaded area in Figure 5.1.
5.1.1 Problem specification
The problem can be approximated as 2-dimensional since the load is applied in the plane of the plate. In a Cartesian coordinate system there are two possible assumptions to take in regard to the behaviour of the structure in the third dimension: (1) the plane stress condition, in which the stress components acting out of the 2D plane are assumed to be negligible; (2) the plane strain condition, in which the strain components out of the 2D plane are assumed negligible. The plane stress condition is appropriate for solids whose third dimension is thin as in this case; the plane strain condition is applicable for solids where the third dimension is thick.
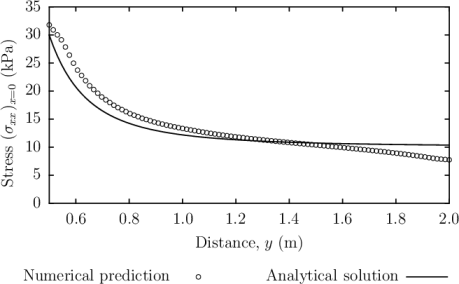
An analytical solution exists for loading of an infinitely large, thin plate with a circular hole. The solution for the stress normal to the vertical plane of symmetry is
 | (5.1) |
Results from the simulation will be compared with this solution. At the end of the tutorial, the user can: investigate the sensitivity of the solution to mesh resolution and mesh grading; and, increase the size of the plate in comparison to the hole to try to estimate the error in comparing the analytical solution for an infinite plate to the solution of this problem of a finite plate.
5.1.2 Mesh generation
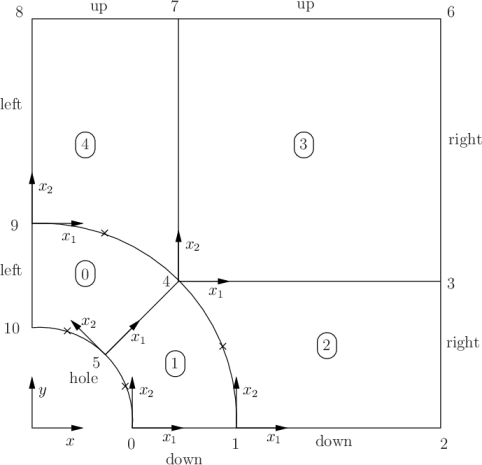
The domain consists of four blocks, some of which have arc-shaped edges. The
block structure for the part of the mesh in the  plane is shown in
Figure 5.2. As already mentioned in section 2.1.1.1, all geometries are generated
in 3 dimensions in OpenFOAM even if the case is to be as a 2 dimensional
problem. Therefore a dimension of the block in the
plane is shown in
Figure 5.2. As already mentioned in section 2.1.1.1, all geometries are generated
in 3 dimensions in OpenFOAM even if the case is to be as a 2 dimensional
problem. Therefore a dimension of the block in the  direction has to be
chosen; here, 0.5
direction has to be
chosen; here, 0.5  is selected. It does not affect the solution since
the traction boundary condition is specified as a stress rather than a
force, thereby making the solution independent of the cross-sectional area.
is selected. It does not affect the solution since
the traction boundary condition is specified as a stress rather than a
force, thereby making the solution independent of the cross-sectional area.
The user should change into the plateHole case in the $FOAM_RUN/tutorials/stressAnalysis/solidDisplacementFoam directory and open the system/blockMeshDict file in an editor, as listed below
17scale 1;
18
19vertices
20(
21 (0.5 0 0)
22 (1 0 0)
23 (2 0 0)
24 (2 0.707107 0)
25 (0.707107 0.707107 0)
26 (0.353553 0.353553 0)
27 (2 2 0)
28 (0.707107 2 0)
29 (0 2 0)
30 (0 1 0)
31 (0 0.5 0)
32 (0.5 0 0.5)
33 (1 0 0.5)
34 (2 0 0.5)
35 (2 0.707107 0.5)
36 (0.707107 0.707107 0.5)
37 (0.353553 0.353553 0.5)
38 (2 2 0.5)
39 (0.707107 2 0.5)
40 (0 2 0.5)
41 (0 1 0.5)
42 (0 0.5 0.5)
43);
44
45blocks
46(
47 hex (5 4 9 10 16 15 20 21) (10 10 1) simpleGrading (1 1 1)
48 hex (0 1 4 5 11 12 15 16) (10 10 1) simpleGrading (1 1 1)
49 hex (1 2 3 4 12 13 14 15) (20 10 1) simpleGrading (1 1 1)
50 hex (4 3 6 7 15 14 17 18) (20 20 1) simpleGrading (1 1 1)
51 hex (9 4 7 8 20 15 18 19) (10 20 1) simpleGrading (1 1 1)
52);
53
54edges
55(
56 arc 0 5 (0.469846 0.17101 0)
57 arc 5 10 (0.17101 0.469846 0)
58 arc 1 4 (0.939693 0.34202 0)
59 arc 4 9 (0.34202 0.939693 0)
60 arc 11 16 (0.469846 0.17101 0.5)
61 arc 16 21 (0.17101 0.469846 0.5)
62 arc 12 15 (0.939693 0.34202 0.5)
63 arc 15 20 (0.34202 0.939693 0.5)
64);
65
66boundary
67(
68 left
69 {
70 type symmetryPlane;
71 faces
72 (
73 (8 9 20 19)
74 (9 10 21 20)
75 );
76 }
77 right
78 {
79 type patch;
80 faces
81 (
82 (2 3 14 13)
83 (3 6 17 14)
84 );
85 }
86 down
87 {
88 type symmetryPlane;
89 faces
90 (
91 (0 1 12 11)
92 (1 2 13 12)
93 );
94 }
95 up
96 {
97 type patch;
98 faces
99 (
100 (7 8 19 18)
101 (6 7 18 17)
102 );
103 }
104 hole
105 {
106 type patch;
107 faces
108 (
109 (10 5 16 21)
110 (5 0 11 16)
111 );
112 }
113 frontAndBack
114 {
115 type empty;
116 faces
117 (
118 (10 9 4 5)
119 (5 4 1 0)
120 (1 4 3 2)
121 (4 7 6 3)
122 (4 9 8 7)
123 (21 16 15 20)
124 (16 11 12 15)
125 (12 13 14 15)
126 (15 14 17 18)
127 (15 18 19 20)
128 );
129 }
130);
131
132mergePatchPairs
133(
134);
135
136// ************************************************************************* //
18
19vertices
20(
21 (0.5 0 0)
22 (1 0 0)
23 (2 0 0)
24 (2 0.707107 0)
25 (0.707107 0.707107 0)
26 (0.353553 0.353553 0)
27 (2 2 0)
28 (0.707107 2 0)
29 (0 2 0)
30 (0 1 0)
31 (0 0.5 0)
32 (0.5 0 0.5)
33 (1 0 0.5)
34 (2 0 0.5)
35 (2 0.707107 0.5)
36 (0.707107 0.707107 0.5)
37 (0.353553 0.353553 0.5)
38 (2 2 0.5)
39 (0.707107 2 0.5)
40 (0 2 0.5)
41 (0 1 0.5)
42 (0 0.5 0.5)
43);
44
45blocks
46(
47 hex (5 4 9 10 16 15 20 21) (10 10 1) simpleGrading (1 1 1)
48 hex (0 1 4 5 11 12 15 16) (10 10 1) simpleGrading (1 1 1)
49 hex (1 2 3 4 12 13 14 15) (20 10 1) simpleGrading (1 1 1)
50 hex (4 3 6 7 15 14 17 18) (20 20 1) simpleGrading (1 1 1)
51 hex (9 4 7 8 20 15 18 19) (10 20 1) simpleGrading (1 1 1)
52);
53
54edges
55(
56 arc 0 5 (0.469846 0.17101 0)
57 arc 5 10 (0.17101 0.469846 0)
58 arc 1 4 (0.939693 0.34202 0)
59 arc 4 9 (0.34202 0.939693 0)
60 arc 11 16 (0.469846 0.17101 0.5)
61 arc 16 21 (0.17101 0.469846 0.5)
62 arc 12 15 (0.939693 0.34202 0.5)
63 arc 15 20 (0.34202 0.939693 0.5)
64);
65
66boundary
67(
68 left
69 {
70 type symmetryPlane;
71 faces
72 (
73 (8 9 20 19)
74 (9 10 21 20)
75 );
76 }
77 right
78 {
79 type patch;
80 faces
81 (
82 (2 3 14 13)
83 (3 6 17 14)
84 );
85 }
86 down
87 {
88 type symmetryPlane;
89 faces
90 (
91 (0 1 12 11)
92 (1 2 13 12)
93 );
94 }
95 up
96 {
97 type patch;
98 faces
99 (
100 (7 8 19 18)
101 (6 7 18 17)
102 );
103 }
104 hole
105 {
106 type patch;
107 faces
108 (
109 (10 5 16 21)
110 (5 0 11 16)
111 );
112 }
113 frontAndBack
114 {
115 type empty;
116 faces
117 (
118 (10 9 4 5)
119 (5 4 1 0)
120 (1 4 3 2)
121 (4 7 6 3)
122 (4 9 8 7)
123 (21 16 15 20)
124 (16 11 12 15)
125 (12 13 14 15)
126 (15 14 17 18)
127 (15 18 19 20)
128 );
129 }
130);
131
132mergePatchPairs
133(
134);
135
136// ************************************************************************* //
Until now, we have only specified straight edges in the geometries of previous tutorials but here we need to specify curved edges. These are specified under the edges keyword entry which is a list of non-straight edges. The syntax of each list entry begins with the type of curve, including arc, simpleSpline, polyLine etc., described further in User Guide section ??. In this example, all the edges are circular and so can be specified by the arc keyword entry. The following entries are the labels of the start and end vertices of the arc and a point vector through which the circular arc passes.
The blocks in this blockMeshDict do not all have the same orientation. As can
be seen in Figure 5.2 the  direction of block 0 is equivalent to the
direction of block 0 is equivalent to the  direction for block 4. This means care must be taken when defining the number
and distribution of cells in each block so that the cells match up at the block
faces.
direction for block 4. This means care must be taken when defining the number
and distribution of cells in each block so that the cells match up at the block
faces.
6 patches are defined: one for each side of the plate, one for the hole and one for the front and back planes. The left and down patches are both a symmetry plane. Since this is a geometric constraint, it is included in the definition of the mesh, rather than being purely a specification on the boundary condition of the fields. Therefore they are defined as such using a special symmetryPlane type as shown in the blockMeshDict.
The frontAndBack patch represents the plane which is ignored in a 2D case. Again this is a geometric constraint so is defined within the mesh, using the empty type as shown in the blockMeshDict. For further details of boundary types and geometric constraints, the user should refer to User Guide section ??.
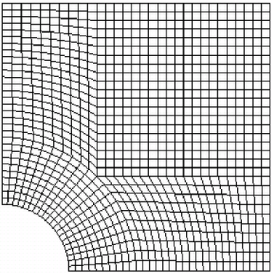
The remaining patches are of the regular patch type. The mesh should be generated using blockMesh and can be viewed in paraFoam as described in section 2.1.2. It should appear as in Figure 5.3.
5.1.2.1 Boundary and initial conditions
Once the mesh generation is complete, the initial field with boundary conditions must be set. For a stress analysis case without thermal stresses, only displacement D needs to be set. The 0/D is as follows:
17dimensions [0 1 0 0 0 0 0];
18
19internalField uniform (0 0 0);
20
21boundaryField
22{
23 left
24 {
25 type symmetryPlane;
26 }
27 right
28 {
29 type tractionDisplacement;
30 traction uniform (10000 0 0);
31 pressure uniform 0;
32 value uniform (0 0 0);
33 }
34 down
35 {
36 type symmetryPlane;
37 }
38 up
39 {
40 type tractionDisplacement;
41 traction uniform (0 0 0);
42 pressure uniform 0;
43 value uniform (0 0 0);
44 }
45 hole
46 {
47 type tractionDisplacement;
48 traction uniform (0 0 0);
49 pressure uniform 0;
50 value uniform (0 0 0);
51 }
52 frontAndBack
53 {
54 type empty;
55 }
56}
57
58// ************************************************************************* //
18
19internalField uniform (0 0 0);
20
21boundaryField
22{
23 left
24 {
25 type symmetryPlane;
26 }
27 right
28 {
29 type tractionDisplacement;
30 traction uniform (10000 0 0);
31 pressure uniform 0;
32 value uniform (0 0 0);
33 }
34 down
35 {
36 type symmetryPlane;
37 }
38 up
39 {
40 type tractionDisplacement;
41 traction uniform (0 0 0);
42 pressure uniform 0;
43 value uniform (0 0 0);
44 }
45 hole
46 {
47 type tractionDisplacement;
48 traction uniform (0 0 0);
49 pressure uniform 0;
50 value uniform (0 0 0);
51 }
52 frontAndBack
53 {
54 type empty;
55 }
56}
57
58// ************************************************************************* //
Firstly, it can be seen that the displacement initial conditions are set to 
 .
The left and down patches must be both of symmetryPlane type since they are
specified as such in the mesh description in the constant/polyMesh/boundary file.
Similarly the frontAndBack patch is declared empty.
.
The left and down patches must be both of symmetryPlane type since they are
specified as such in the mesh description in the constant/polyMesh/boundary file.
Similarly the frontAndBack patch is declared empty.
The other patches are traction boundary conditions, set by a specialist traction
boundary type. The traction boundary conditions are specified by a linear
combination of: (1) a boundary traction vector under keyword traction; (2) a
pressure that produces a traction normal to the boundary surface that is defined
as negative when pointing out of the surface, under keyword pressure. The up
and hole patches are zero traction so the boundary traction and pressure are set
to zero. For the right patch the traction should be 
 and the
pressure should be 0
and the
pressure should be 0  .
.
5.1.2.2 Mechanical properties
The physical properties for the case are set in the mechanicalProperties dictionary in the constant directory. For this problem, we need to specify the mechanical properties of steel given in Table 5.1. In the mechanical properties dictionary, the user must also set planeStress to yes.
| Property | Units | Keyword | Value |
| Density |  | rho | 7854 |
| Young’s modulus |  | E |  |
| Poisson’s ratio | — | nu | 0.3 |
Table 5.1: Mechanical properties for steel
5.1.2.3 Thermal properties
The temperature field variable T is present in the solidDisplacementFoam solver since the user may opt to solve a thermal equation that is coupled with the momentum equation through the thermal stresses that are generated. The user specifies at run time whether OpenFOAM should solve the thermal equation by the thermalStress switch in the thermalProperties dictionary. This dictionary also sets the thermal properties for the case, e.g. for steel as listed in Table 5.2.
| Property | Units | Keyword | Value |
| Specific heat capacity |    | C | 434 |
| Thermal conductivity |    | k | 60.5 |
| Thermal expansion coeff. | | alpha |  |
Table 5.2: Thermal properties for steel
In this case we do not want to solve for the thermal equation. Therefore we must set the thermalStress keyword entry to no in the thermalProperties dictionary.
5.1.2.4 Control
As before, the information relating to the control of the solution procedure are
read in from the controlDict dictionary. For this case, the startTime is 0  . The
time step is not important since this is a steady state case; in this situation it is
best to set the time step deltaT to 1 so it simply acts as an iteration
counter for the steady-state case. The endTime, set to 100, then acts as
a limit on the number of iterations. The writeInterval can be set to
. The
time step is not important since this is a steady state case; in this situation it is
best to set the time step deltaT to 1 so it simply acts as an iteration
counter for the steady-state case. The endTime, set to 100, then acts as
a limit on the number of iterations. The writeInterval can be set to
 .
.
The controlDict entries are as follows:
17
18application solidDisplacementFoam;
19
20startFrom startTime;
21
22startTime 0;
23
24stopAt endTime;
25
26endTime 100;
27
28deltaT 1;
29
30writeControl timeStep;
31
32writeInterval 20;
33
34purgeWrite 0;
35
36writeFormat ascii;
37
38writePrecision 6;
39
40writeCompression off;
41
42timeFormat general;
43
44timePrecision 6;
45
46graphFormat raw;
47
48runTimeModifiable true;
49
50
51// ************************************************************************* //
18application solidDisplacementFoam;
19
20startFrom startTime;
21
22startTime 0;
23
24stopAt endTime;
25
26endTime 100;
27
28deltaT 1;
29
30writeControl timeStep;
31
32writeInterval 20;
33
34purgeWrite 0;
35
36writeFormat ascii;
37
38writePrecision 6;
39
40writeCompression off;
41
42timeFormat general;
43
44timePrecision 6;
45
46graphFormat raw;
47
48runTimeModifiable true;
49
50
51// ************************************************************************* //
5.1.2.5 Discretisation schemes and linear-solver control
Let us turn our attention to the fvSchemes dictionary. Firstly, the problem we are analysing is steady-state so the user should select SteadyState for the time derivatives in timeScheme. This essentially switches off the time derivative terms. Not all solvers, especially in fluid dynamics, work for both steady-state and transient problems but solidDisplacementFoam does work, since the base algorithm is the same for both types of simulation.
The momentum equation in linear-elastic stress analysis includes several explicit terms containing the gradient of displacement. The calculations benefit from accurate and smooth evaluation of the gradient. Normally, in the finite volume method the discretisation is based on Gauss’s theorem The Gauss method is sufficiently accurate for most purposes but, in this case, the least squares method will be used. The user should therefore open the fvSchemes dictionary in the system directory and ensure the leastSquares method is selected for the grad(U) gradient discretisation scheme in the gradSchemes sub-dictionary:
17
18d2dt2Schemes
19{
20 default steadyState;
21}
22
23ddtSchemes
24{
25 default Euler;
26}
27
28gradSchemes
29{
30 default leastSquares;
31 grad(D) leastSquares;
32 grad(T) leastSquares;
33}
34
35divSchemes
36{
37 default none;
38 div(sigmaD) Gauss linear;
39}
40
41laplacianSchemes
42{
43 default none;
44 laplacian(DD,D) Gauss linear corrected;
45 laplacian(DT,T) Gauss linear corrected;
46}
47
48interpolationSchemes
49{
50 default linear;
51}
52
53snGradSchemes
54{
55 default none;
56}
57
58// ************************************************************************* //
18d2dt2Schemes
19{
20 default steadyState;
21}
22
23ddtSchemes
24{
25 default Euler;
26}
27
28gradSchemes
29{
30 default leastSquares;
31 grad(D) leastSquares;
32 grad(T) leastSquares;
33}
34
35divSchemes
36{
37 default none;
38 div(sigmaD) Gauss linear;
39}
40
41laplacianSchemes
42{
43 default none;
44 laplacian(DD,D) Gauss linear corrected;
45 laplacian(DT,T) Gauss linear corrected;
46}
47
48interpolationSchemes
49{
50 default linear;
51}
52
53snGradSchemes
54{
55 default none;
56}
57
58// ************************************************************************* //
The fvSolution dictionary in the system directory controls the linear equation
solvers and algorithms used in the solution. The user should first look at
the solvers sub-dictionary and notice that the choice of solver for D is
GAMG. The solver tolerance should be set to  for this problem. The
solver relative tolerance, denoted by relTol, sets the required reduction
in the residuals within each iteration. It is uneconomical to set a tight
(low) relative tolerance within each iteration since a lot of terms in each
equation are explicit and are updated as part of the segregated iterative
procedure. Therefore a reasonable value for the relative tolerance is
for this problem. The
solver relative tolerance, denoted by relTol, sets the required reduction
in the residuals within each iteration. It is uneconomical to set a tight
(low) relative tolerance within each iteration since a lot of terms in each
equation are explicit and are updated as part of the segregated iterative
procedure. Therefore a reasonable value for the relative tolerance is  , or
possibly even higher, say
, or
possibly even higher, say  , or in some cases even
, or in some cases even  (as in this
case).
(as in this
case).
17
18solvers
19{
20 "(D|T)"
21 {
22 solver GAMG;
23 tolerance 1e-06;
24 relTol 0.9;
25 smoother GaussSeidel;
26 nCellsInCoarsestLevel 20;
27 }
28}
29
30stressAnalysis
31{
32 compactNormalStress yes;
33 nCorrectors 1;
34 D 1e-06;
35}
36
37
38// ************************************************************************* //
18solvers
19{
20 "(D|T)"
21 {
22 solver GAMG;
23 tolerance 1e-06;
24 relTol 0.9;
25 smoother GaussSeidel;
26 nCellsInCoarsestLevel 20;
27 }
28}
29
30stressAnalysis
31{
32 compactNormalStress yes;
33 nCorrectors 1;
34 D 1e-06;
35}
36
37
38// ************************************************************************* //
The fvSolution dictionary contains a sub-dictionary, stressAnalysis that contains some control parameters specific to the application solver. Firstly there is nCorrectors which specifies the number of outer loops around the complete system of equations, including traction boundary conditions within each time step. Since this problem is steady-state, we are performing a set of iterations towards a converged solution with the ’time step’ acting as an iteration counter. We can therefore set nCorrectors to 1.
The D keyword specifies a convergence tolerance for the outer iteration
loop, i.e. sets a level of initial residual below which solving will cease. It
should be set to the desired solver tolerance specified earlier,  for this
problem.
for this
problem.
5.1.3 Running the code
The user should run the code here in the background from the command line as specified below, so he/she can look at convergence information in the log file afterwards.
cd $FOAM_RUN/tutorials/stressAnalysis/solidDisplacementFoam/plateHole
solidDisplacementFoam > log &
 the run has converged and can be stopped by killing the batch
job.
the run has converged and can be stopped by killing the batch
job.
5.1.4 Post-processing
Post processing can be performed as in section 2.1.4. The solidDisplacementFoam
solver outputs the stress field  as a symmetric tensor field sigma. This is
consistent with the way variables are usually represented in OpenFOAM solvers
by the mathematical symbol by which they are represented; in the case of Greek
symbols, the variable is named phonetically.
as a symmetric tensor field sigma. This is
consistent with the way variables are usually represented in OpenFOAM solvers
by the mathematical symbol by which they are represented; in the case of Greek
symbols, the variable is named phonetically.
For post-processing individual scalar field components,  ,
,  etc., can be
generated by running the postProcess utility as before in section 2.1.5.7, this time
on sigma:
etc., can be
generated by running the postProcess utility as before in section 2.1.5.7, this time
on sigma:
postProcess -func 'components(sigma)'
stresses can be viewed in paraFoam as shown in Figure 5.4.
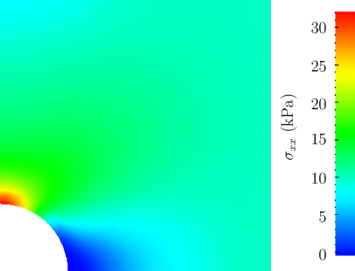
 stress field in the plate with hole.
stress field in the plate with hole. We would like to compare the analytical solution of Equation 5.1 to our
solution. We therefore must output a set of data of  along the left edge
symmetry plane of our domain. The user may generate the required graph data
using the postProcess utility, using a sets function object. The utility can be
driven from a user-supplied file located in the system directory, whose entries are
summarised in User Guide Table ??. The sample line specified in sets is set
between
along the left edge
symmetry plane of our domain. The user may generate the required graph data
using the postProcess utility, using a sets function object. The utility can be
driven from a user-supplied file located in the system directory, whose entries are
summarised in User Guide Table ??. The sample line specified in sets is set
between  and
and  , and the fields are specified in the
fields list:
, and the fields are specified in the
fields list:
8
9singleGraph
10{
11 start (0 0.5 0.25);
12 end (0 2 0.25);
13 fields (sigmaxx);
14
15 #includeEtc "caseDicts/postProcessing/graphs/sampleDict.cfg"
16
17 setConfig
18 {
19 axis y;
20 }
21
22 // Must be last entry
23 #includeEtc "caseDicts/postProcessing/graphs/graph.cfg"
24}
25
26// ************************************************************************* //
9singleGraph
10{
11 start (0 0.5 0.25);
12 end (0 2 0.25);
13 fields (sigmaxx);
14
15 #includeEtc "caseDicts/postProcessing/graphs/sampleDict.cfg"
16
17 setConfig
18 {
19 axis y;
20 }
21
22 // Must be last entry
23 #includeEtc "caseDicts/postProcessing/graphs/graph.cfg"
24}
25
26// ************************************************************************* //
The writeFormat is raw 2 column format. The data is written into files within time
subdirectories of a sets directory, e.g. the data at  s is found within the
file sets/100/leftPatch_sigmaxx.xy. In an application such as GnuPlot, one could
type the following at the command prompt would be sufficient to plot both the
numerical data and analytical solution:
s is found within the
file sets/100/leftPatch_sigmaxx.xy. In an application such as GnuPlot, one could
type the following at the command prompt would be sufficient to plot both the
numerical data and analytical solution:
plot [0.5:2] [0:] 'sets/100/leftPatch_sigmaxx.xy',
1e4*(1+(0.125/(x**2))+(0.09375/(x**4)))

5.1.5 Exercises
The user may wish to experiment with solidDisplacementFoam by trying the following exercises:
5.1.5.1 Increasing mesh resolution
Increase the mesh resolution in each of the  and
and  directions. Use mapFields to
map the final coarse mesh results from section 5.1.4 to the initial conditions for
the fine mesh.
directions. Use mapFields to
map the final coarse mesh results from section 5.1.4 to the initial conditions for
the fine mesh.
5.1.5.2 Introducing mesh grading
Grade the mesh so that the cells near the hole are finer than those away from the hole. Design the mesh so that the ratio of sizes between adjacent cells is no more than 1.1 and so that the ratio of cell sizes between blocks is similar to the ratios within blocks. Mesh grading is described in section 2.1.6. Again use mapFields to map the final coarse mesh results from section 5.1.4 to the initial conditions for the graded mesh. Compare the results with those from the analytical solution and previous calculations. Can this solution be improved upon using the same number of cells with a different solution?
5.1.5.3 Changing the plate size
The analytical solution is for an infinitely large plate with a finite sized hole in it. Therefore this solution is not completely accurate for a finite sized plate. To estimate the error, increase the plate size while maintaining the hole size at the same value.
[prev]